Bevor ich auf den eigentlichen Weichenantrieb und die steuernde Elektronik eingehe, gibt es ein paar Vorbemerkungen zu Gleisen und Weichen.
Mit der Wahl der Spurweite N für die neu aufzubauende Anlage war die Festlegung auf das Gleismaterial
Peco finescale Code 55 wegen der vielen positiven Meinungen in diversen Foren nur noch eine Formsache.
Die in zahlreichen Beiträgen zu findenden Erfahrungsberichte brachten mich recht schnell dazu, die zwei häufig genannten Probleme der Weichen von vorn herein zu vermeiden.
Konstruktiv sieht Peco vor, dass die Stromzuführung zu den Weichenzungen über deren "strammes" Anliegen an den Außenschienen erfolgt. Die in diversen Quellen zu findenden Erfahrungen der Hobby-Kollegen sind aber sehr durchwachsen. Darüber hinaus können auch großzügige Toleranzen der Spurweite von Radsätzen zu Kurzschlüssen an der freiliegenden Zungenschiene führen.
Es gibt einige Lösungen und Umbauvorschläge, die sowohl die Kontakt- als auch die Kurzschluss-Problematik beseitigen. Nachteilig ist dabei nur, dass eine separate, mit der Weichenlage umzuschaltende Polarisierung vorgenommen werden muss. Je nach Ausführung des Antriebs erfolgt diese Polarisierung über Relais, die vom Dekoder gesteuert werden oder Umschaltern, die an die Antriebs-Mechanik gekoppelt sind.
Für erste Tests habe ich den Umbau der Weichen nach der Beschreibung
"PECO Weichenumbau" von Steffen Krumbholz ausgeführt. Die Erfahrungen waren so positiv, dass ich beim späteren Aufbau der Anlage dieses Verfahren ohne Änderungen anwenden werde.
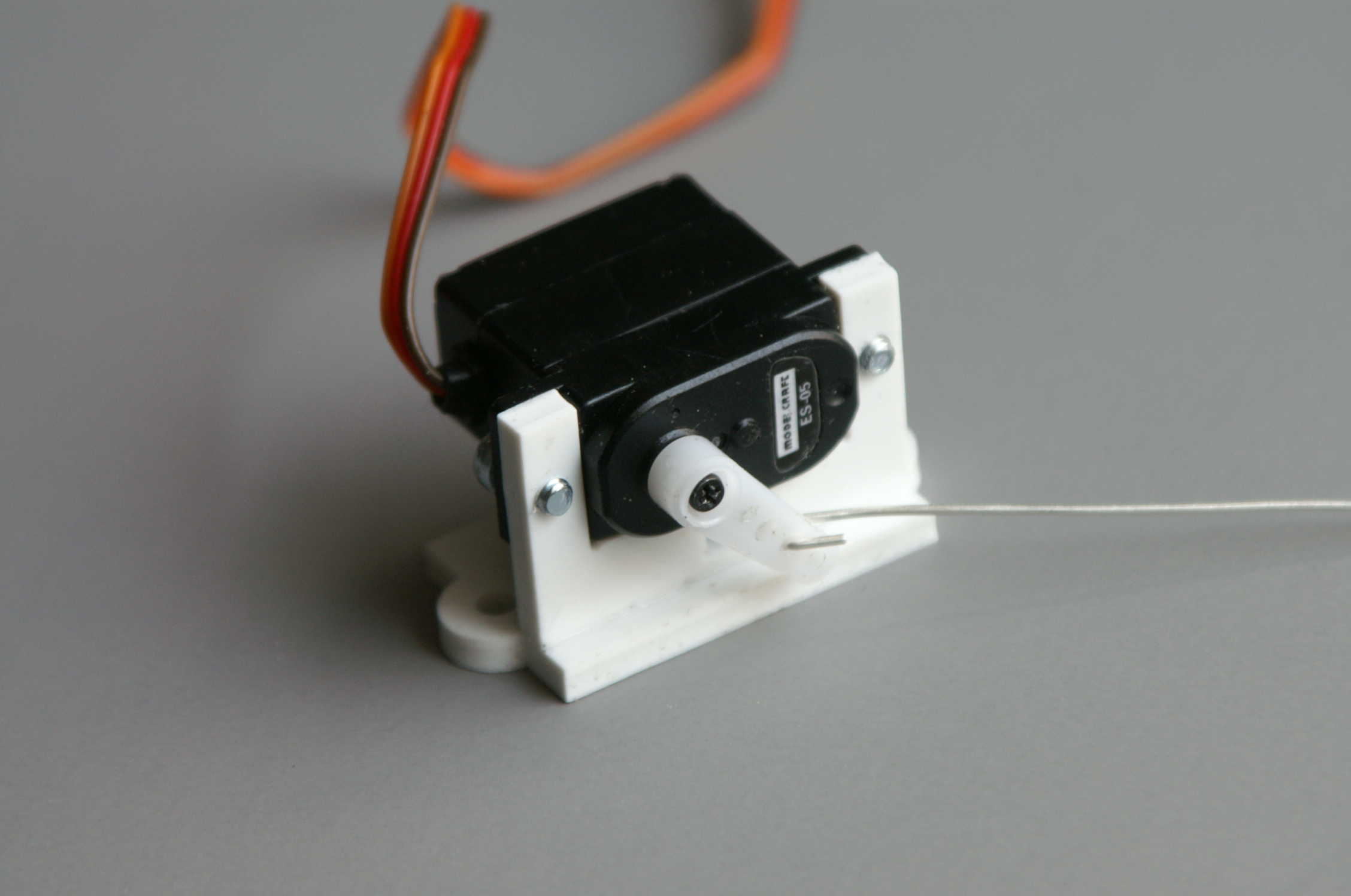
Für den Antrieb der Weichen gibt es viele Möglichkeiten, wobei die anzustrebende Kombination von hoher Betriebsicherheit, vorbildgerechter Stellgeschwindigkeit und geringem Kostenfaktor die Entscheidung zum Modellbau-Servo geradezu aufdrängt. Einzelheiten zu den genannten Faktoren und als Entscheidungshilfe sind umfänglich im Web zu finden. Für den Antrieb von Weichen, Formsignalen und Bahnschranken ist der preiswerte und leicht erhältliche Servo
ES-05 mein Objekt der Wahl.
In früheren Posts habe ich schon beschrieben, dass Rocrail die Ansteuerung der auf der Anlage befindlichen Elemente über die Ausgangs-Funktion von
MGV50 LocoIO ausführen soll. Mit den im LocoNet zur Verfügung stehenden Befehlen und den Möglichkeiten der Hardware ist aber nur ein Ein-/Aus-Schalten einer 5V-Spannung mit max. 20mA Belastbarkeit möglich. Das reicht nur für das Schalten von LEDs oder kleinen Relais bzw. Leistungs-Transistoren. Mit den Relais oder Transistoren könnten dann auch Magnetspulen oder Motoren für Weichenantriebe angesteuert werden. Dafür gibt es u. a. die Schnittstellen-Baugruppen
MGV76,
MGV77 und
MGV125, die ich hier aber nicht beschreibe, weil sie für diese Anlage nicht benötigt werden.
Etwas Theorie zur Ansteuerung von Servos
Die aus dem Modellbau bekannten Servos erforden eine andere Ansteuerung als Magnet-Spulen oder Motoren. Servos haben im Gegensatz zu Spulen oder Motoren nicht nur zwei feste Endlagen bzw. Drehrichtungen, sondern können zwischen den Endlagen jede beliebige Positon einnehmen und diese mit sehr unterschiedlichen Geschwindigkeiten anfahren. Die dafür erforderliche Treiberelektronik ist in jedem Servo fest integriert, erfordert aber ein spezielles, wenn auch für fast alle Servo-Typen gleichartiges Steuersignal.
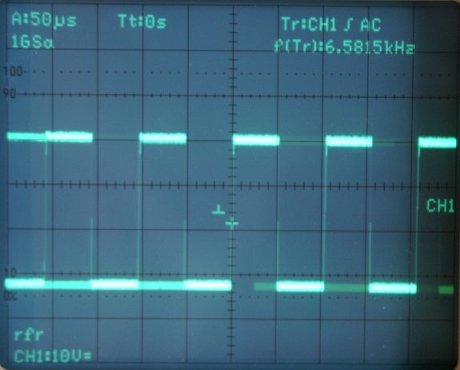
Das Servo-Steuersignal besteht aus einer Folge von Impulsen, bei der die Zeitdauer des positiven Impulses (+5V) die Hebelstellung des Servos bestimmt. Die Genauigkeit der Einstellung beliebiger Positionen hängt von den Eigenschaften des Servo-Typs und der Impulserzeugung der Ansteuerung ab.
Die Steuerimpulse werden fortlaufend mit Pausen von ca. 20ms wiederholt. Die absolute Zeit der Pausen hat auf die Einstellung des Servos keinen Einfluss und soll min. 10ms, kann aber auch 100ms betragen.
Der Hebel bzw. das Horn kann bei den meisten Servo-Typen in verschiedenen Grundpositionen auf eine gezahnte Achse aufgesteckt werden. Die in der Grafik gezeigte Positionierung ist ein der einfachen Erläuterung geschuldetes Beispiel. Alternativ zum Hebel können auch ein dem ES-05 beigefügtes Kreuz oder Rad verwendet werden. Beide sind aber auch als Zubehör erhältlich.
Wenn sich der Hebel bei 0
° befindet und eine Pulsbreite von 2ms empfangen wird, bewegt sich der Hebel mit der max. Geschwindigkeit des Servo-Motors nach 180°. Je nach Typ und Größe des Servos kann diese Bewegung z.B. in ca. 0,2s erfolgen. Für viele Anwendungen im Modellbau und auch bei Weichenantrieben wäre das für eine vorbildgerechte Bewegung zu schnell.
Durch Ändern der Pulsbreite während der Servo-Bewegung kann aber die Einstellzeit des Servo-Hebels beeinflusst werden. Soll die Bewegung von 0
° bis 180° z.B. in 2s erfolgen, erhalten die während dieser Zeit übertragenen ca. 90 bis 100 Impulse nicht sofort die Pulsbreite von 2ms, sondern werden kontinuierlich vom ersten Impuls mit 1ms bis zum letzten Impuls auf 2ms geändert. Durch geeignete Funktionen in der Firmware des steuernden Dekoders kann die Impulserzeugung für Bewegunsprofile von Servos in weiten Bereichen programmiert werden. So kann z.B. das Nachwippen von Bahnschranken und Form-/Flügel-Signalen nachgestellt werden. Die z. Zt. verfügbare Firmware des MGV136 bietet solche Eigenschaften nicht.
Nach Erreichen der gewünschten Position neigen viele Servos dazu, Ungenauigkeiten der Einstellung mit kleinen Regelschwingungen auszugleichen. Das führt zu deutlich hörbarem Brummen oder sogar zu Zitterbewegungen des Hebels. Werden bei Erreichen der gewünschten Position keine weiteren Impulse gesendet, erfolgt auch keine Regelung mehr und die unerwünschten Regelschwingungen unterbleiben.
Ohne Regelung hat der Servo-Motor aber keinen Halteeffekt und rückwirkende Kräfte werden nicht mehr gebremst. Für Anwendungen bei der Modellbahn ist aber normalerweise die Bremswirkung der starken Untersetzung des Servo-Getriebes auch ohne aktiven Motor ausreichend.
Für die Erzeugung des Servo-Steuersignals sind eine Reihe von Servo-Dekodern aus Hobby-Projekten und von kommerziellen Anbietern verfügbar.
Der Servo-Dekoder MGV136
In der MGV-Familie gibt es den
MGV136 als Servo-Dekoder, der gesteuert von 4 Ports eines MGV50 LocoIO bis zu 4 Servos treiben kann.
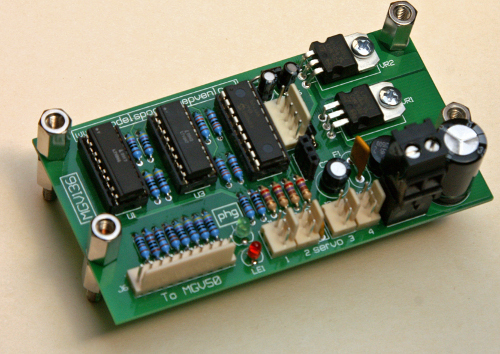 |
| Servo-Dekoder MGV136 (Bausatz über PHG) |
Ein wichtiges Alleinstellungs-Merkmal dieses Dekoders ist die 100%ge Steuerung und Programmierung über nur 4 Port-Anschlüsse und den
speziellen Programmier-Dialog in Rocrail. Damit erfolgen alle Einstellungen der Servos ohne eine Bedienung an der Baugruppe. Der MGV136 kann also sofort an seiner endgültigen Position unter der Anlage montiert werden. Die eigentliche Übertragung von Programmierbefehlen erfolgt durch Pakete spezieller Bitmuster an den 4 Ports.
Für die Realisierung der oben beschriebenen Weichen-Polarisierung gibt es optional die Relais-Baugruppe
MGV137. Diese Baugruppe werde ich nicht verwenden, weil ich mich für eine in die Antriebsmechanik integrierte Polarisierung entschieden habe.
Über 4 als Eingänge programmierte Ports des MGV50 LocoIO kann auch eine Rückmeldung der Weichenlage (richtiger: der Servo-Sollstellung) erfolgen. Eine Rückmeldung der tatsächlichen mechanischen Stellung der Servos ist das nicht, was bei der hohen Betriebsicherheit selbst preiswerter Servos aber kein Nachteil ist. Bei der Steuerung mit Rocrail kann aber mit einer Einstellung der Fahstraßenstellzeit eine gleichwertige Bedingung hergestellt werden. Damit kann die Rückmeldung aus dem MGV136 entfallen und die Optokoppler U3A bis D und die Widerstände R5 bis 8 sowie R13 bis 16 brauchen nicht bestückt werden. Die frei bleibenden Ports des MGV50 können dann z.B. für einen anderen MGV136 verwendet werden.
Aufbau und Betrieb
Wie schon mehrfach erwähnt war auch hier der Aufbau problemlos. Die Inbetriebnahme war leider nicht so trivial, wie bei den anderen Baugruppen.
Für jeden der 4 Servos kann die linke (0°-90°) und rechte (90°-180°) Endlage in 100 Stufen eingestellt werden. Die Geschwindigkeit jedes Servo kann auf einen von vier festen Werte programmiert werden.
Das Einstellen über den Programmierdialog in Rocrail war zwar fehlerfrei möglich, jedoch sehr mühsam, weil bei jedem Aufruf des Dialogs die Adressen der verwendetetn MGV50-Ports neu eingestellt werden mussten. Schon beim Programmieren zeigten sich die später im Betrieb sporadisch auftretenden Bewegungen in eine Endlage. Die festgestellten Mängel sind zwischenzeitlich durch Nachbesserungen der Firmware beseitigt. Auch der Programmierdialog in Rocrail wurde verbessert und die letzten Einstellungen werden gesichert und wieder hergestellt..
Nachdem die Mängel beseitigt sind, ist das Programmieren des MGV136 und das Justieren der Servos eine sehr schöne Sache. Dass der MGV136 dafür nicht zugänglich sein muss, ist ein absolutes highlight.
Beim MGV136 werden die Steuerimpulse nur während der Einstellzeit des Servo gesendet und die oben beschriebenen Regelschwingungen treten nicht auf. Die Bremswirkung des ES-05 ohne aktiven Motor ist völlig ausreichend.
Ein Wunsch an den Entwickler Peter Giling bzgl. einer Überlappung der Endlagen-Einstell-Bereiche (z.B. 0°-110° und 70°-180°) wurde noch nicht realisiert.
Einer der nächsten Beiträge hat Tests der aufgebauten Mechanik zum Thema.